DVP50MC11T与A2-E伺服EtherCAT通信
1、PLC和伺服硬件接线。PLC电源接线,驱动器电源接线,电机动力线,编码器线。PLC EtherCAN网口与第一台伺服RUN口网线连接,第一台伺服ERR口与第二台伺服RUN口连接。如果第二台是最后一台 ,弄个终端电阻。

2、通电测试。上电后,伺服驱动器报AL013紧急停止AL014反向运转禁止极限AL015正向运转禁止极限。
满足临时测试要求,修改驱动器P2-15~P2-17的值为0.即可解除报警。
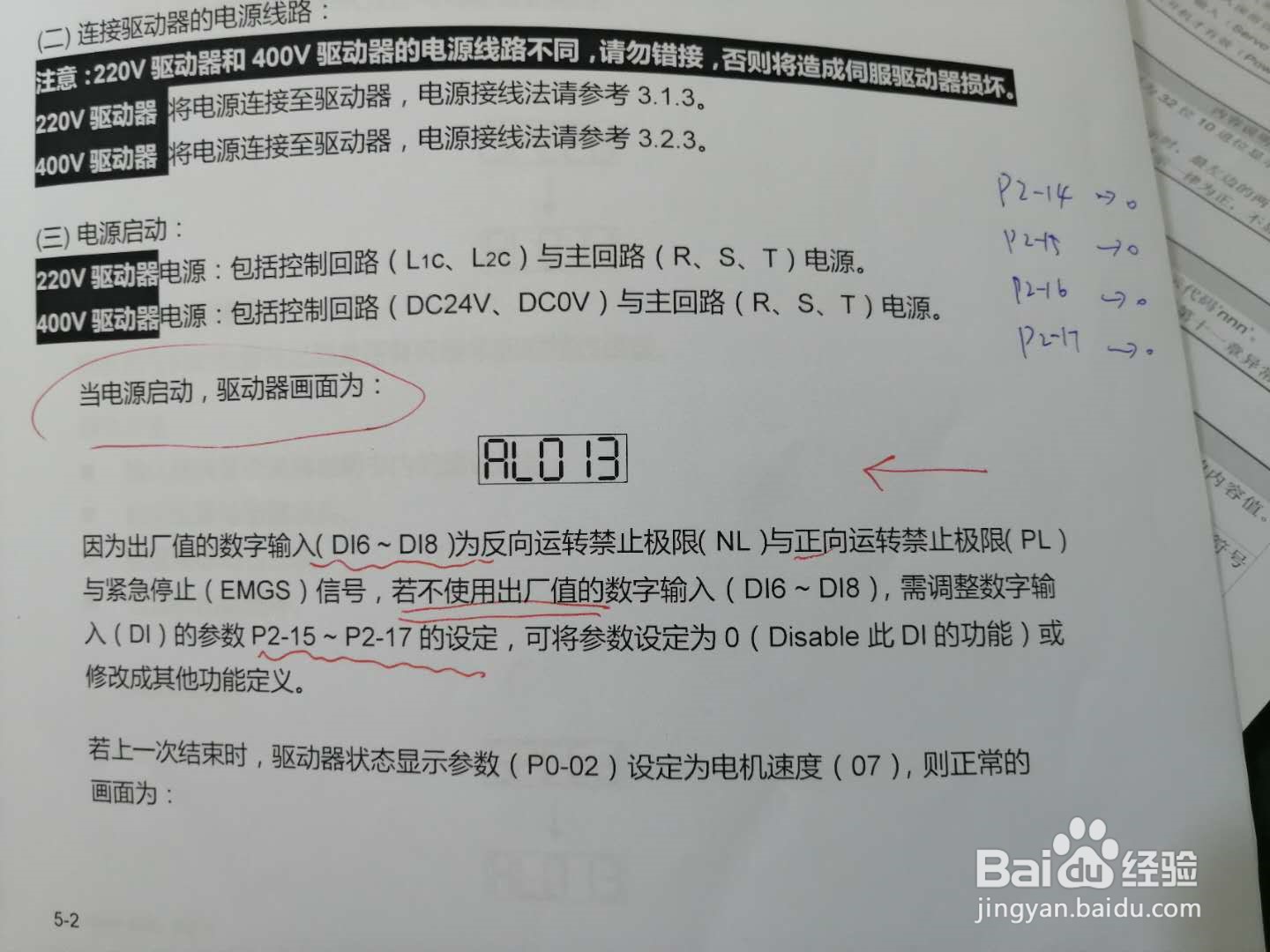
3、修改驱动器P2-15~P2-17修改完后,驱动器需要重新上电。下图为可正常运行。PLC上EtherCAN指示灯闪亮。


4、电脑与PLC连接。
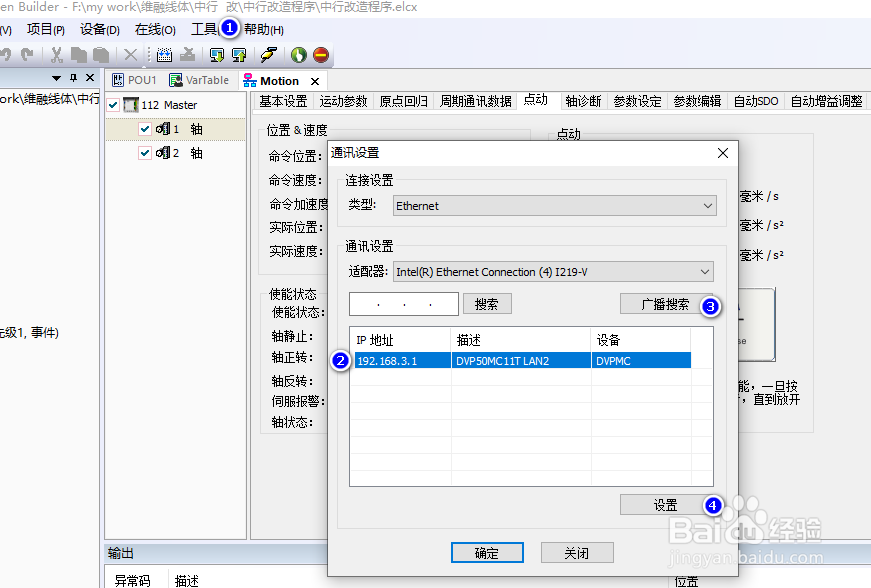
1.打开通信设置先确定PLC的IP,步骤:菜单栏 - 工具 - 通信设置

5、电脑与PLC连接。
2.查找IP或修改IP
点击广播搜索可以搜索IP。电脑IP要跟PLC IP在同一网段才可以。新机IP192.168.1.1。
点击设置可以修改IP。初始密码0000

6、伺服运行测试
1.PLC上的EtherCAN指示灯闪亮。如果不亮检查网线或更换网线或用专用的线。
2.打开CANopen Builder 6.05编程软件
3.网络配置里双击Motion
4.点击112master后 鼠标右键-添加新设备-选择A2-E的驱动器-添加,添加2次

7、伺服运行测试
1.简单修改一下参数,如丝杆导程,默认10000mm太大了 ,改小点。

8、伺服运行测试
2.点击在线监控
3.点击手动切换到手动
4.如EtherCAN连接正常则如图2,否则如图1.


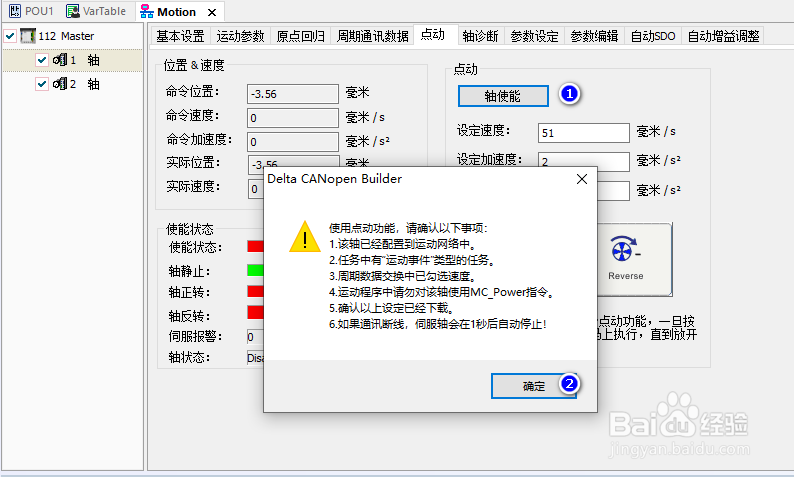
9、伺服点动运行
1.点击- 轴使能。伺服使能打开,弹出对话框点确定
2.注意修改速度和加速度
3.点击正转反转图标就可以控制伺服转动
10、程序控制伺服点动运行
1.MC_Power(使能指令),使能打开后才可使用轴。
2.DMC_Jog(点动指令),用于点动控制轴。指令不明白可以按F1查看帮助。
3.定位控制查看帮助写。
4.DVP50MC11T与A2-E伺服EtherCAT初步调试结束。

