甲壳虫机器人的DIY做法
1、首先把电线截成6cm小段,每段两端的线皮剥去。


2、使用焊锡焊接到马达、开关的相对位置。
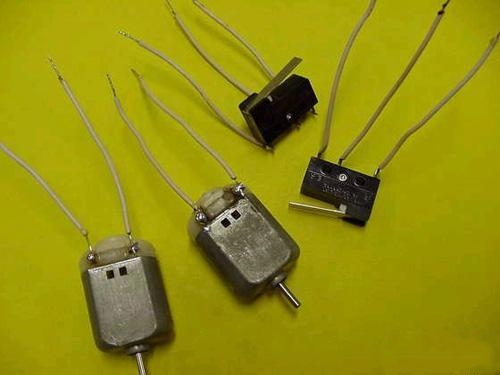
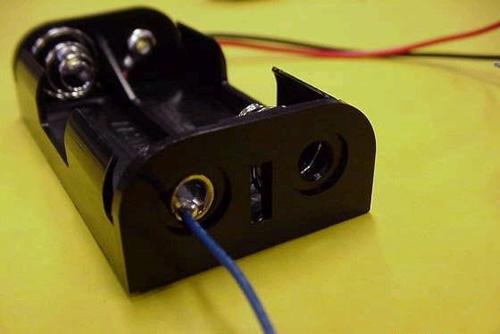
3、把电池盒翻转,这就是甲壳虫的身体部分,把两个单刀双掷开关用胶水粘贴到相应位置。


4、两个马达的安装,这就是甲壳虫的两只%26ldquo;前脚%26rdquo。

5、由于是全轮驱动,后脚部分随便安装个轮子就行。

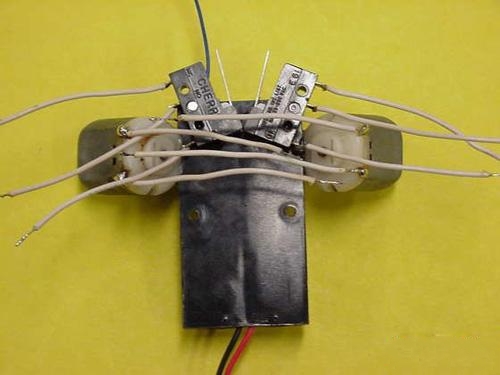
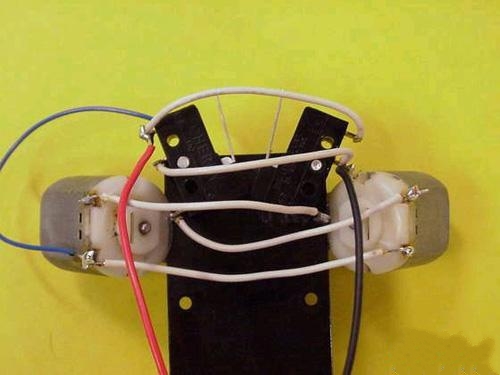
6、先按照图中的样子焊接好线路,后面给大家讲解电路图。
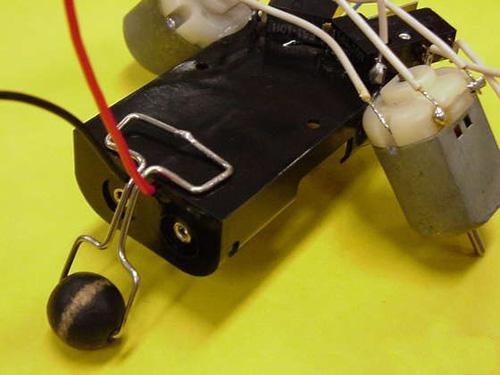
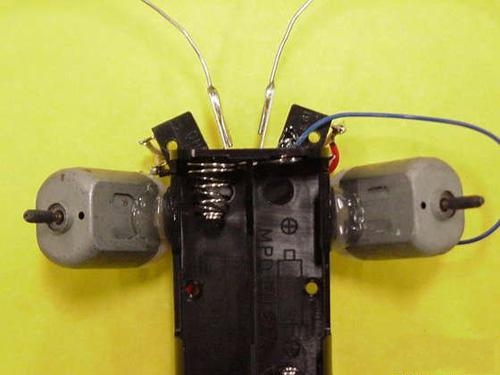
7、使用曲别针做成触角,注意形状一定要好,小机器人撞到障碍物后能否灵巧绕过全靠它们了。


8、骨架部分基本完成,注意马达的传动轴,为了增加触地面积以及增大摩擦力,套上了一个小橡胶套。



9、然后是修饰工作,当然外壳越漂亮越好。


